Групи невеликих пристроїв здатні спільно переміщатися, змінювати форму та адаптуватися до складного рельефу без жодного централізованого управління чи складних обчислювальних систем.
Читайте также: GPT-4.5 не змогли відрізнити від людини в 73% випадків — модель успішно пройшла тест Тьюринга
Замість цифрових команд технологія покладається на «механічний інтелект» та безпосередню фізичну взаємодію, про що повідомляється в журналі Science Robotics.
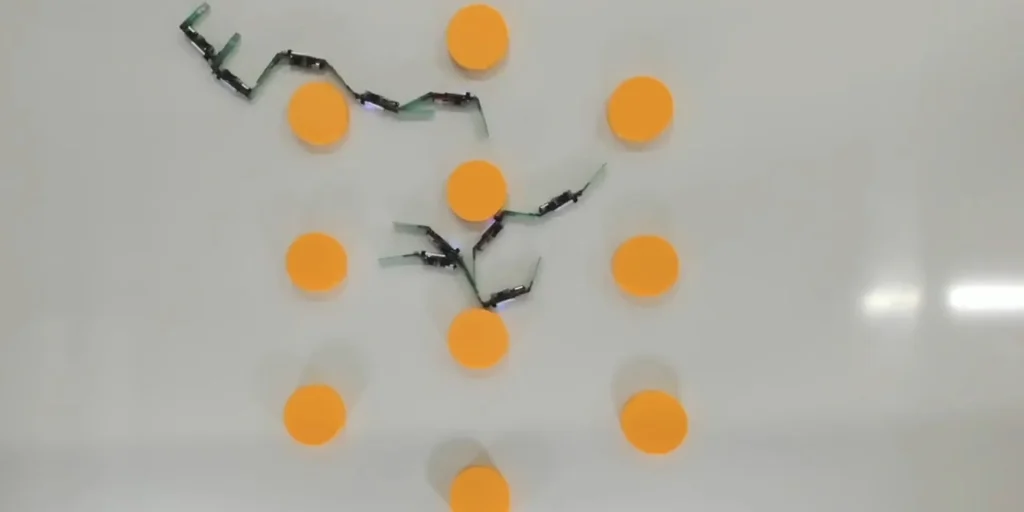
Кожен окремий роботизований модуль має довжину 20 сантиметрів(200 міліметрів) та ширину 2 сантиметри(20 міліметрів). Вбудований мініатюрний двигун змушує пристрій постійно змінювати форму, переключаючись між прямою та дугоподібною конфігураціями. Це створює штовхальну силу, яка рухає модуль уперед. На кінцях кожного робота розміщені слабкі текстильні застібки-липучки. Завдяки їм машини можуть тимчасово з’єднуватися в ланцюжки та роз’єднуватися під час руху, долаючи круті підйоми, де поодинці вони зазвичай зупиняються.
У середовищі з великою кількістю перешкод цей колектив діє як рідина або активний гель — зв’язки розриваються, щоб уникнути застрягання, і миттєво утворюються знову для збереження цілісності групи.
Читайте также: З півметровими крилами. У Німеччині знайшли нового птерозавра юрського періоду
Провідні автори дослідження Кірстін Петерсен та Данна Ма підкреслюють, що система є абсолютно автономною та стійкою до пошкоджень: якщо один із модулів виходить із ладу або в нього розряджається батарея, загальна працездатність рою не порушується.
Спрощена інтеграція базових датчиків звуку дозволяє роботам легко наздоганяти групу, якщо вони випадково від’єдналися, що робить цю розробку перспективною для використання у непередбачуваних умовах реального світу.
Читайте также: Михайло Федоров Національність: Детальный обзор биографии и карьеры