В основі розробки лежить поєднання 3D-друку, рідкокристалічних еластомерів та принципів оригамі. Новий підхід дозволяє інтегрувати механізм руху безпосередньо в молекулярну структуру матеріалу, роблячи роботів автономними та компактними.
Читайте также: Таємниці безодні. Біля берегів Японії виявили невідому істоту на глибині понад 9 кілометрів
Для створення пристроїв використовувався спеціально розроблений 3D-принтер, який наносить полімер шарами з певним молекулярним вирівнюванням. Це дає змогу«програмувати» реакцію матеріалу на тепло: окремі зони діють як шарніри, що згинаються за чітко заданою траєкторією при нагріванні. Щоб забезпечити точність рухів, автори проєкту впровадили легкі панелі зі скловолокна між шарнірами та інтегрували гнучкі печатні плати безпосередньо в процесі друку.
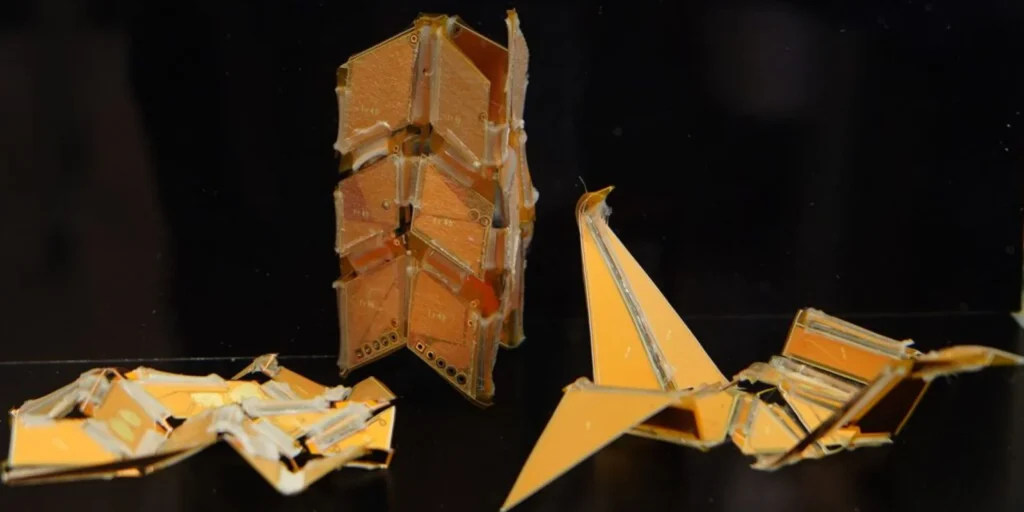
Ефективність технології продемонстрували на моделі робота у формі журавля. Під впливом електричного струму вбудовані схеми нагрівають певні ділянки еластомеру, змушуючи конструкцію махати крилами. Система оснащена датчиками температури, які забезпечують зворотний зв’язок у режимі реального часу, дозволяючи роботу коригувати похибки та підтримувати стабільність рухів протягом багатьох циклів без ознак зносу.
Читайте также: Енергетичний гігант. Уряд Британії дав добро на сонячну ферму на 800 МВт
Розробники наголошують, що головним викликом була системна інтеграція різних дисциплін — від електротехніки до математичного моделювання оригамі. Створений інструментарій дозволяє проектувати аналогічні системи для промислового виробництва. Очікується, що в майбутньому такі масштабовані м’які роботи зможуть безпечно працювати в умовах, де традиційні металеві машини безсилі, зокрема під час складних медичних операцій всередині людського організму або в екстремальних середовищах.
Читайте также: Прорив у медицині. Вчені знайшли приховану причину гіпертонії в головному мозку
Результати дослідження оприлюднені в журналі Advanced Functional Materials.