Про це пише видання Interesting Engineering.
Метод створили для роботів із тяговими тросами, які можуть згинатися та скручуватися подібно до біологічних структур. Такі машини корисні в обмежених умовах, наприклад усередині людського тіла, але їх складно контролювати через майже безліч варіантів руху. Коли робот має кілька секцій, троси впливають один на одного, що ускладнює визначення потрібного положення.
Читайте также: Оптичний трюк з минулого. Вчені використали ефект 200-річної давнини для захисту цифрових даних
Щоб спростити керування, команда запропонувала модель віртуального простору приводу. Вона описує рух лише двома параметрами: напрямком і величиною. Це дозволяє не керувати кожним тросом окремо та зменшує обчислювальне навантаження.
На відміну від жорстких роботів із фіксованими шарнірами, гнучкі системи можуть рухатися майже нескінченною кількістю способів, а збільшення кількості секцій додає нові троси, які взаємодіють між собою. Це створює складну задачу вибору правильного троса для досягнення потрібної форми або положення.
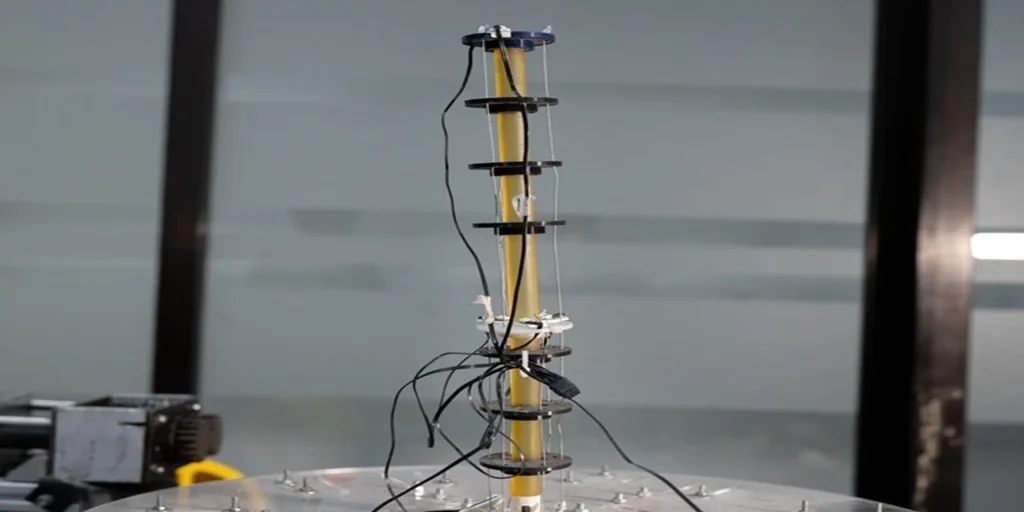
Для перевірки методу дослідники створили двосекційну роботизовану руку з шістьма моторами. Система захоплення руху відстежувала положення за допомогою світлодіодних міток і порівнювала фактичну позицію з заданою.
Робот мав досягати різних точок і рухатися по складних траєкторіях, зокрема у формі п’ятикутника, спіралі та кривих. Під час тестів похибка становила менш ніж 1%.
Читайте также: Мінімум зовнішньої речовини. Нове дослідження ставить під сумнів теорію формування Землі
Для оцінки ефективності створили роботизовану руку з двома секціями та шістьма моторами для точного згинання. Камери відстежували позицію за LED-мітками, після чого комп’ютер порівнював її з бажаною і коригував роботу моторів.
Результати показали, що різні секції можуть працювати незалежно: одна частина згинається, тоді як інша залишається нерухомою. Це підвищує точність у складних завданнях.
Автори вважають, що метод можна застосувати у складніших системах із більшою кількістю секцій. Його планують використовувати в хірургії, промисловій автоматизації та під час перевірок у вузьких місцях, наприклад у двигунах літаків.
Читайте также: Так само, як молодь. Люди після 60 років можуть розвивати соціальні та емоційні навички — дослідження
- Темпи виробництва зросли. Китайська компанія AGIBOT випустила 10-тисячного гуманоїдного робота
- Без людей. Гуманоїдного робота HMND 01 протестували на складі автомобільного заводу
- Автоматизація процесів. Роботи навчилися брати скло і блискучі предмети без датчиків глибини