Про це пише видання Interesting Engineering.
Люди легко орієнтуються на жвавих вулицях, навіть коли навколо відблиски, тіні та різні типи поверхонь. Але для машин це складне завдання. Автопілоти та хірургічні роботи часто«губляться», коли одночасно бачать матові й блискучі поверхні — наприклад, цегляну стіну поруч із металевим бампером або тканини тіла разом із рідинами, що відбивають світло.
Читайте также: Син Ілона Маска: биография, личная жизнь и перспективы
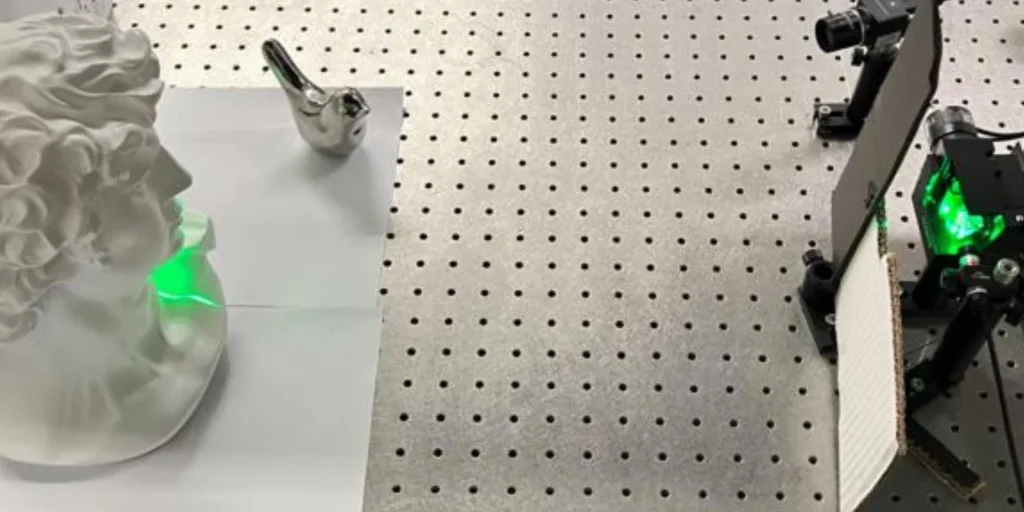
Команда вчених створила систему, яка поєднує лазерний сканер і так звану подієву камеру. Завдяки цьому сенсори можуть швидше отримувати чіткі 3D-зображення навіть у складних умовах освітлення.
За словами доцента Коледжу оптичних наук Аризонського університету Флоріан Віломіцер, одна з головних цілей проєкту — навчити комп’ютери бачити в 3D краще за людину. Це важливо для безпечної навігації безпілотних автомобілів, роботизованої хірургії та промислових перевірок.
Зазвичай для точного вимірювання форми блискучих об’єктів використовують метод дефлектометрії. Для нього потрібні великі екрани, які проєктують світлові шаблони на поверхню. Наприклад, автовиробники будують цілі тунелі з екранами, щоб перевіряти кузови автомобілів після фарбування. Такі системи дорогі й непридатні для рухомих роботів.
Дослідники запропонували інший підхід: замість окремого великого екрана використовувати як «екран» усе приміщення. Система сканує кімнату лазером, а алгоритми розділяють матові й блискучі поверхні.
Читайте также: Життя подешевшає. Джефф Безос закликав не боятися ШІ
Автор дослідження Анікет Дашпут пояснив, що технологія дозволяє аналізувати всі об’єкти в кімнаті, включно з глянцевими, дзеркальними та матовими поверхнями, а потім використовувати матові частини сцени для вимірювання блискучих об’єктів.
Щоб система працювала з рухомими об’єктами, вчені відмовилися від звичайних камер. Стандартні камери записують зображення кадр за кадром, а нова нейроморфна камера реагує лише на зміни яскравості. Це зменшує кількість зайвих даних і дозволяє фіксувати швидкий рух у 3D навіть за складного освітлення.
Прототип уже може відстежувати рухомі об’єкти з різними типами поверхонь із дуже високою частотою кадрів. Поки що технологію тестують у лабораторії Аризонського університету, але дослідники вважають, що її можна масштабувати.
У майбутньому систему планують використовувати для різних завдань — від спостереження за мікроскопічними судинами під час операцій до цифрового сканування кімнат і будівель.
Читайте также: DeepSeek розробляє власний інструмент для агентного кодування — прямого конкурента Claude Code та Codex
- Робот замість підмайстра. В Австралії дроїд допоможе реконструювати будинок у зоні лісових пожеж
- Під час великого онлайн-розпродажу. У Китаї проведуть перший у світі аукціон гуманоїдних роботів
- Підкорити Місяць. Студенти Вірджинії готують роботів-будівельників для майбутньої бази NASA